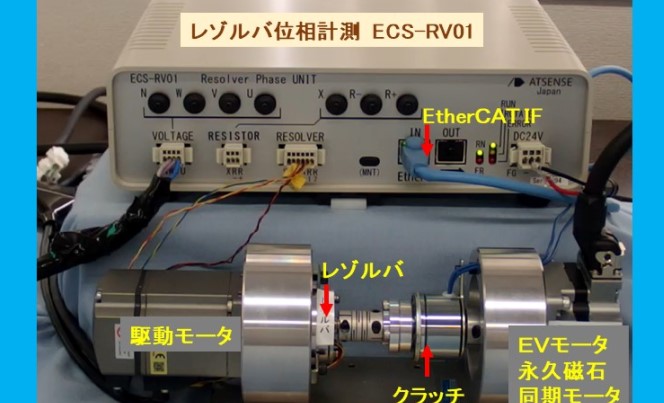
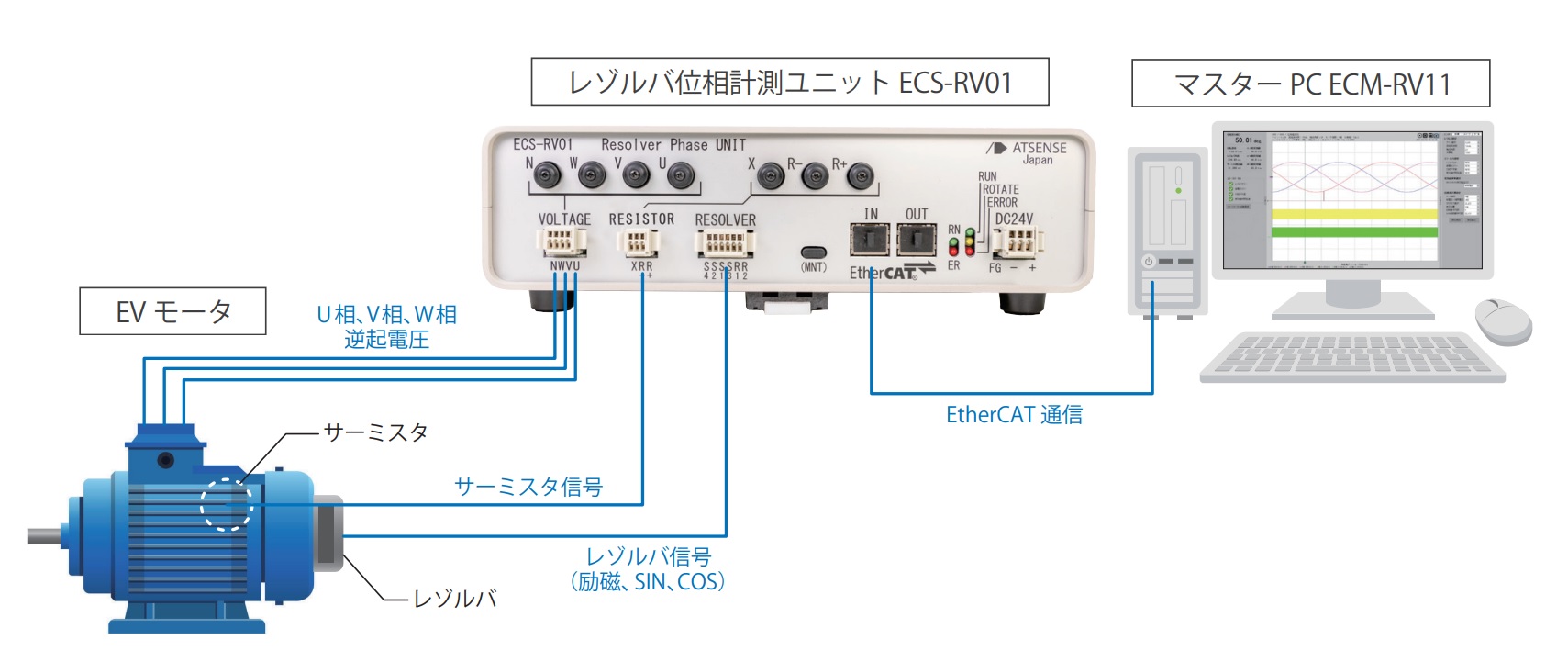
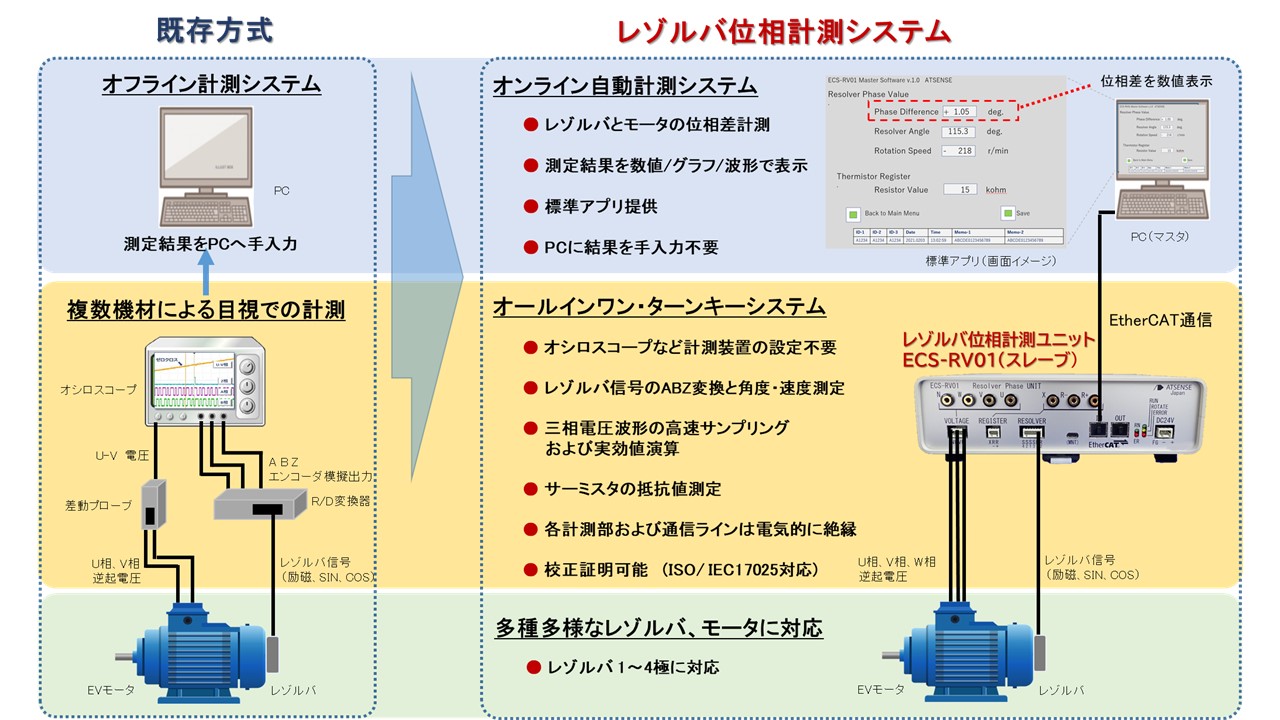
EVモータの三相逆起電圧とレゾルバ信号を直接入力し位相差計測及びデータの収集をします。 この位相計測により、モータの正しい磁石位置の把握が可能になり、効率のよい駆動制御を実現します。
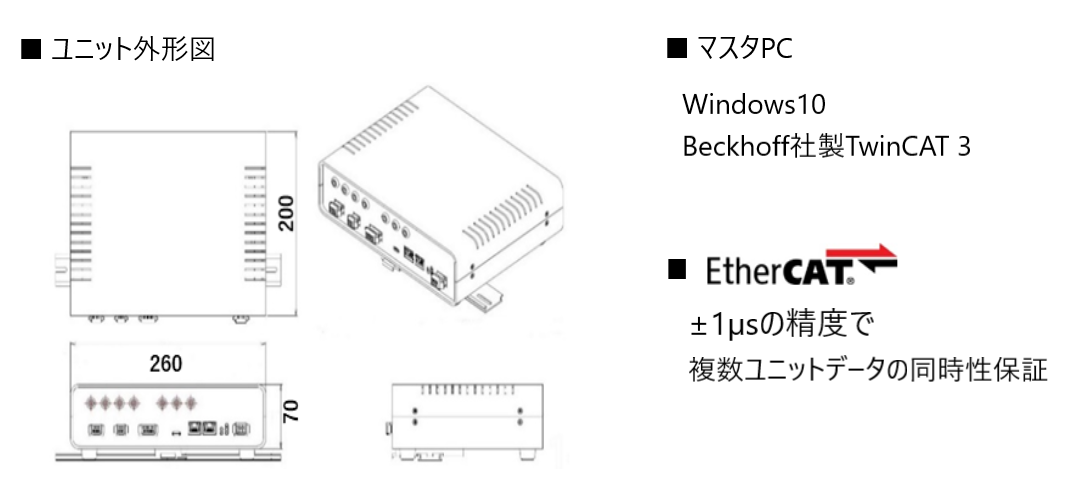
ユニットとマスターPCをワンパッケージでご提案します 計測対象モータを駆動モータで回転させて計測します
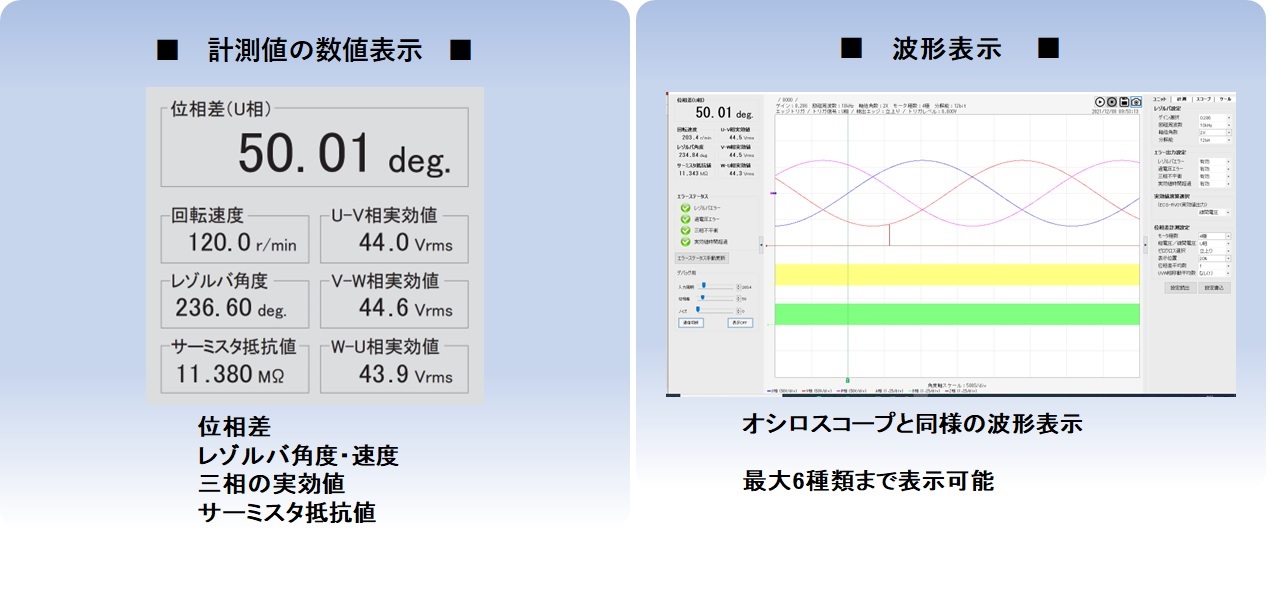
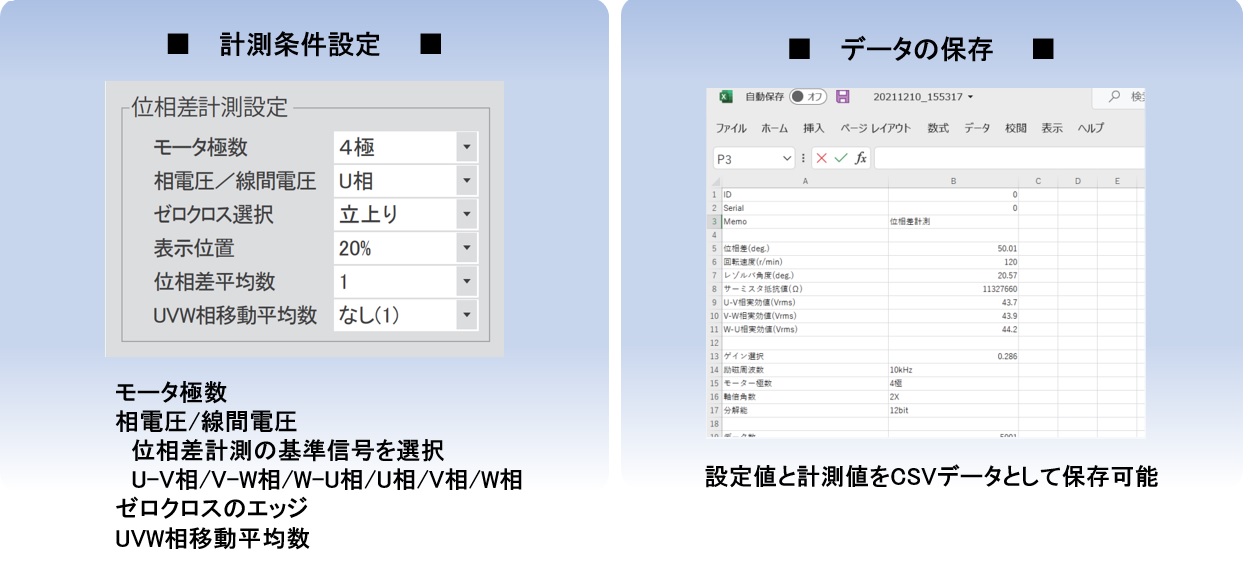
●位相差計測は数値と波形を同時に表示
●レゾルバ位相、角度・速度、サーミスタ抵抗値、三相実効値など多彩な計測
●計測条件と計測をCSVデータ、画面をハードコピー
●ユニット電圧値の校正証明書を発行可能 ISO/IEC17025
●EtherCAT通信による複数ユニットデータの同時性保証
※本システムはEtherCAT通信を採用しており、接続したEtherCATスレーブ機は同時性を保つことが可能です。
| レゾルバインタフェース部 | |
| 対象レゾルバ | 1相励磁 2相(SIN,COS)出力レゾルバ |
| レゾルバへの出力 | 励磁信号(R1,R2) 7Vrms 10kHzまたは20kHz |
| レゾルバからの入力 | SIN入力(S2,S4)およびCOS入力(S1,S3) 入力ゲイン, 軸倍角数(X1,X2,X3,X4)などを選択可 |
| エンコーダ模擬内部出力 | A相,B相,Z相 位相差計測は最大1200r/min |
| パルス位置出力 | 分解能±0.09°レゾルバ静止時の最大誤差 ±0.4° |
| 回転速度 | エンコーダ模擬信号A相,B相から算出 X2レゾルバのとき0~5000r/min |
| 使用コネクタ | 6ピン スプリング式端子台コネクタ・2.5mmピッチ1列 |
| 逆起電圧入力部 | |
| 入力電圧 | 三相 相間でAC100Vrms以下 温度偏差±0.02V 瞬時値精度±0.07V |
| 変換速度 | 100kSPS (符号付16bitデータ) |
| 耐圧 | 三相+仮想中性点一括 対地 AC2000V1分間 |
| 使用コネクタ | 4ピン スプリング式端子台コネクタ・2.5mmピッチ1列 |
| 抵抗測定部 | |
| 抵抗値範囲 | 100Ω~150kΩ 抵抗値誤差±1.5%(1kΩ~150kΩ), ±4%(100Ω) |
| 想定使用方法 | サーミスタを接続して温度測定(抵抗値→温度換算はマスタにて実施) |
| 使用コネクタ | 2ピン スプリング式端子台コネクタ・2.5mmピッチ1列 |
| EtherCATポート(INおよびOUT) | |
| コネクタ | RJ45ソケット INポート/OUTポート各1 |
| プロトコル | EtherCATスレーブ |
| 接続ケーブル | Ethernetカテゴリ5以上,二重シールド,ストレート配線 ユーザ手配 |
| 伝送速度 | 100Mbps |
| 同期モードの周期 | 1ms固定 |
| 一般仕様 | |
| RoHS指令 | 欧州RoHS1指令対応 |
| 供給電源 | DC24V±20%、700mA max 3ピンスプリング式端子台コネクタ・3.5mmピッチ1列 |
| 電気的絶縁 | 下記グループ間相互で電気的絶縁 ・A/D入力インタフェース(逆起電圧入力) ・レゾルバインタフェース・内部回路 ・EherCATコネクタ(INおよびOUT)・ケース・FG(アース) ・供給電源(DC24V) |
| 使用周囲温度 | -25℃~+60℃ |
| 使用周囲湿度 | 95%RH以下(結露無きこと) |
| 外形寸法 | W:260 D:200 H:70(突起部を除く) |
| 質量 | 約1600g |