


■エンコーダメインユニット

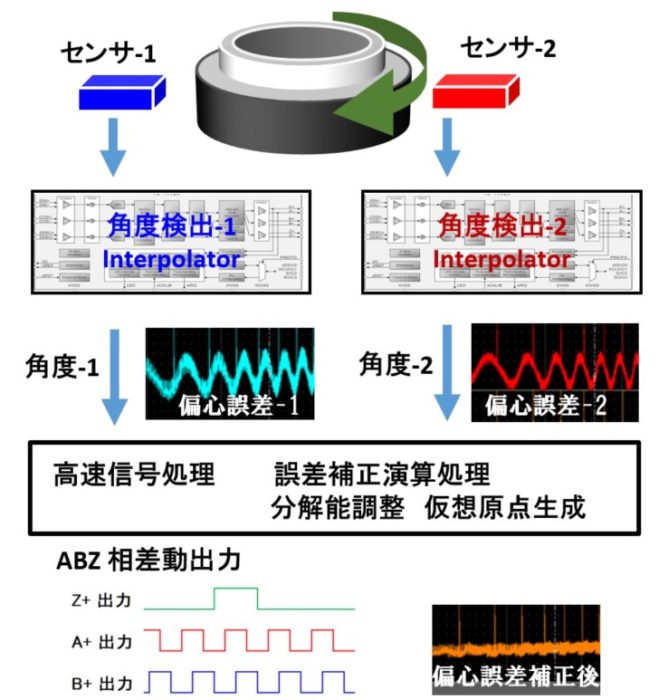
■偏心角度誤差補正技術
■防塵防水グレードIP67
■アクセサリー
延長ケーブル RE-C10-xx
磁気式ロータリエンコーダとインターフェースボックスをつなぐケーブルです
3m、5m、10m、15m、20mから選択
| エンコーダメインユニット | |
| 型式 | RE-10 |
| 検出方式 | 2ヘッド磁気ベクトル検出 |
| 出力信号 | ABZ相およびシリアル通信 RS-485差動パルス出力 |
| 出力波形 | A相進み :上視点時計回り |
| 仮想原点設定 | REF MARK SETが押された角度を原点としメモリ保存 |
| パルスレート | 72、180、360、720、1800P/rev PR-SWで選択 |
| 最高回転速度 | 20000 r/min |
| 電源電圧範囲 | DC10~29V |
| 絶縁範囲 | 供給電源~フレーム~出力信号 |
| 消費電力 | 2W以下 |
| 接続コネクタ | LEMO社製 FGG.1B.316.CLAD76オス |
| 接続ケーブル | Φ6.8約1m多芯ツイストペアシールド |
| 外形寸法 突起部含まず | W 100×H 20×D 70mm |
| 本体質量 | 約350g |
| 耐振動(JASO D 014-3 準拠) | 200m/s² XYZ方向 |
| 動作温度範囲 | -40~100℃ 結露なきこと |
| 防塵防水保護等級(参考値) | IP67相当 AMP部・コネクタ部含まず |
| マグネットドラム | |
| 方式 | 磁気式INC・原点着磁ロータ |
| マグネットドラム直径 | φ40 |
| 回転軸締結手段 | 六角ボルト M10 |
| 質量 | 約90g |
| 回転モーメント | 約21kg・㎜² |
| 動作温度範囲 | -40~120℃ |
| 総合設置公差及びシステム角度検出精度 |
|
| マグネットドラム底面高さ | 0.6±0.5mm エンコーダメインユニット接地面基準 ※1 |
| マグネットドラム偏心許容 | 0.4mmp-p ※ |
| エンコーダメインユニット設置公差 | ±0.4mm 回転中心基準 ※ |
※1 マグネットドラムが本体に接触しないこと